



1.4.1 ROS Actions client server communication
Course subject(s)
Module 1. ROS Essentials
In this lecture, we will look into the desirability of (non)-blocking executions, which leads to ROS Actions. We will show you how the terminology works and give an example of implementation of a counter.
We don’t always want blocking execution. ROS Actions allow non-blocking execution. This way, multiple things can happen at the same time. They are a generalized request-response system (as for services): a client-server infrastructure. Actions are defined by three message types:
- A goal (request),
- The result (response),
- And feedback.
There are a few ROS commands to interact with actions:
Generate action messages manually:
$ rosrun actionlib_msgs genaction.py <path_to_action_file>
Show the contents of an action message:
$ rosmsg show <stack_name>_msgs/<ActionMessage>
ROS actions have a few functions available to process requests:
- The
goalCallbackfunction processes a goal request. - Goal statuses:
ACTIVE,SUCCEEDED,ABORTED.
Nomenclature:
- Action server: A ROS node that advertises an action, so that other nodes can request action goals to be processed.
- Action client: A ROS node that sends goal requests to the action server.
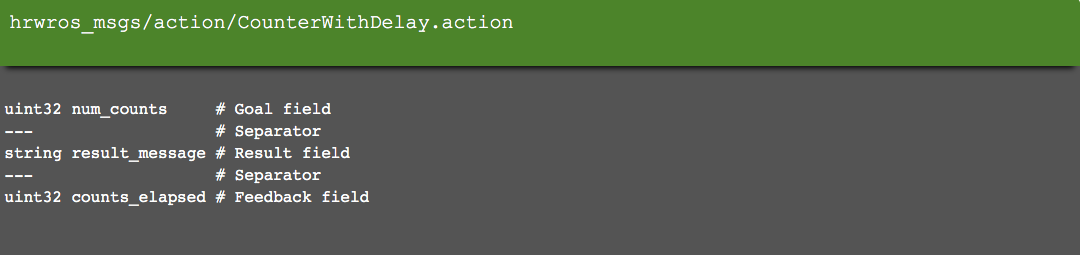
Code example
Here, we will show the general structure of an action file.
Requirement: Counter with a 1s delay between each increment.
Goal message: Number to count up to (uint32)
Result message: A status message (string)
Feedback message: The number of counts completed (uint32)

Hello (Real) World with ROS - Robot Operating System by TU Delft OpenCourseWare is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Based on a work at https://online-learning.tudelft.nl/courses/hello-real-world-with-ros-robot-operating-systems//.