



6.1.2 Behaviour design
Course subject(s)
Module 6. Final
In this lecture, we will dive into how we program the behavior of a robot. We start with the basic and surrounding topics as: Behavior design methods and Robot state machines.
In this video you have learn the basic of designing robot behaviors.
In previous weeks you have learned to implement basic robot capabilities in ROS. Now, to create a complete application you need to coordinate the execution of the nodes implementing those capabilities, so that it results in the desired behavior. You have seen how this applies to our pick example:
- Detect object – use available package
/cameranode - Compute grasp – outputs joint values
/grasp_plannernode - Move to pick – Use MoveIt! service
/move_group - Grasp – commands gripper
/gripper - Retreat – Use MoveIt! service
/move_group - Coordination?
There are many behavior design methods: Finite state machines, Flowcharts, Behavior trees. In this course we will focus on state machines for robotics.
A robot state machine:
- Defines behavior as a sequence of actions as a series of states that become active in an order given by the state transitions.
- Thus they are appropriate to design sequential behaviors.
- A a state represents an atomic action. Optionally:
-
- consumes input data.
- produces output data.
-
- Representation of states and transitions in a state machine:
-
-
- States – blobs
- Transitions – arrows
-
Example: Pick state machine
- Some states need input data: e.g. ‘Compute grasp’ needs the ‘object pose’
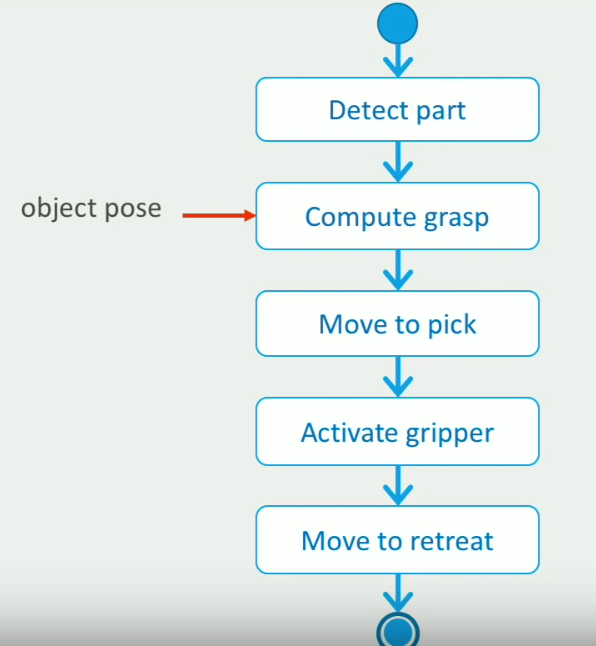
Not all input and output data are specified in this image.

Hello (Real) World with ROS - Robot Operating System by TU Delft OpenCourseWare is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Based on a work at https://online-learning.tudelft.nl/courses/hello-real-world-with-ros-robot-operating-systems//.