



6.3.5 State properties
Course subject(s)
Module 6. Final
In this lecture, you will understand better what a FlexBE state is and what properties it has to interface with the behavior.
Remember
- State encapsulates a single action
- Topics, services and Ros actions provide capabilities
A FlexBE state:
- Represents a specific action
State properties:
- Parameters
-
- configure static properties
- quotation marks gives a literal value
- use a behaviour variable
-
- Input & output keys
-
- input key requires data
- output keys produces data
- dynamic: can take a different value every state activation
- values are behaviour userdata variables
-
- Outcomes
-
- possible outcomes
- possible transitions
- possible execution flows
-
Below you will find two figures, figure A and figure B, which will be used for this lecture’s question.
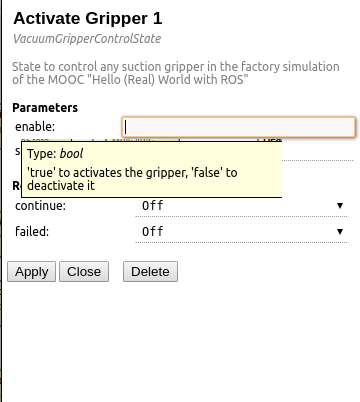
Figure A: Parameter section in FlexBE
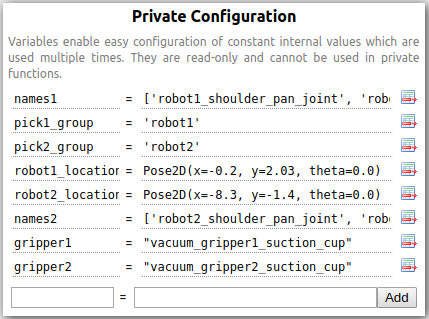
Figure B: Behavior configuration

Hello (Real) World with ROS - Robot Operating System by TU Delft OpenCourseWare is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Based on a work at https://online-learning.tudelft.nl/courses/hello-real-world-with-ros-robot-operating-systems//.