



3.5.3 Husky Tutorials
Course subject(s)
Module 3. Autonomous Navigation
To work with the Husky robot in the next tutorials we will first have to install some packages. These are 3 packages you need.
$ sudo apt-get install ros-kinetic-husky-navigation $ sudo apt-get install ros-kinetic-husky-gazebo $ sudo apt-get install ros-kinetic-husky-viz
Note that, even if you are working with a different ROS-version than kinetic you could still install these packages. In most case you could simply replace kinetic by the name if your distro, for example: indigo.
first terminal open up the Gazebo world:
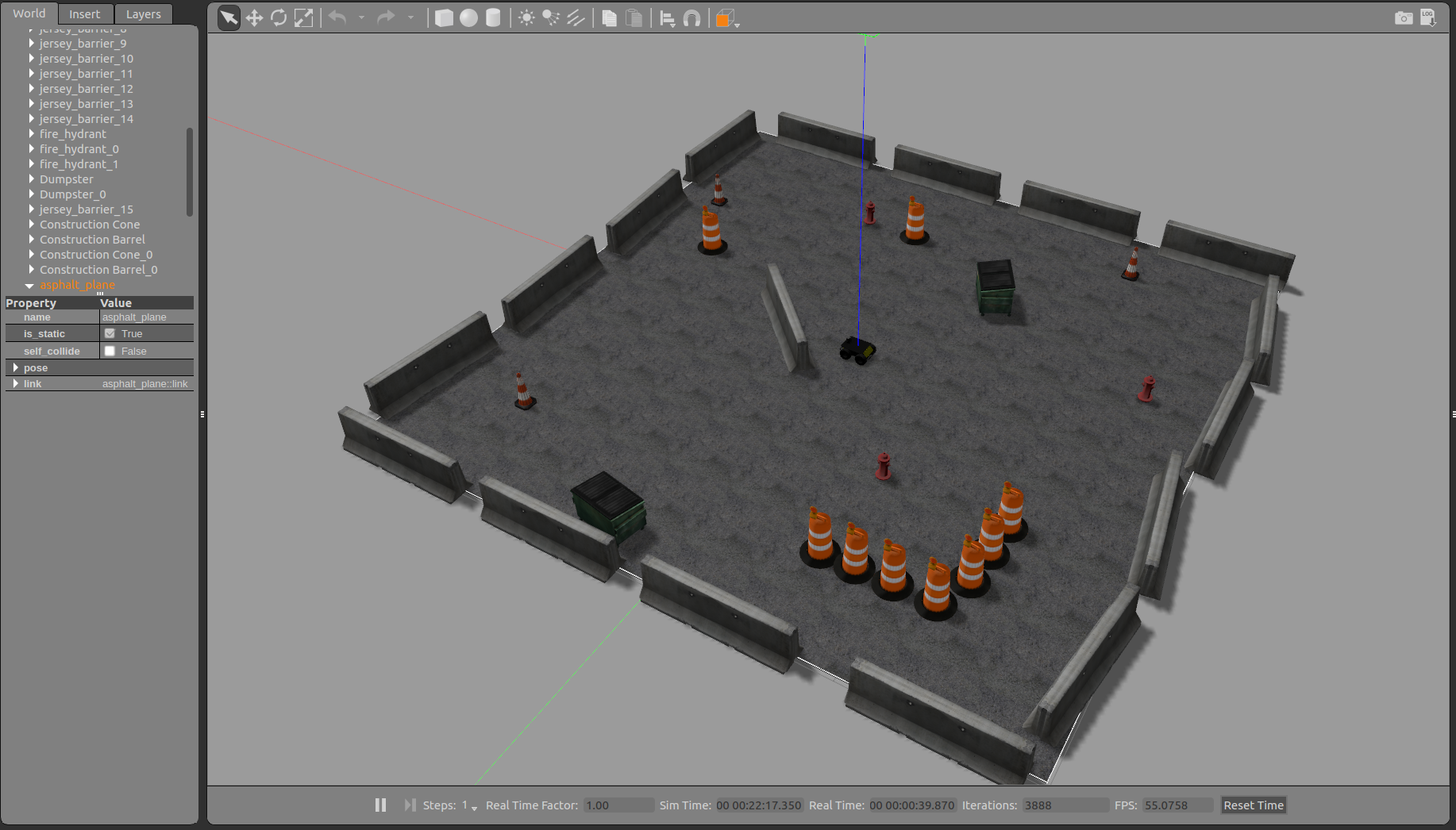
$ roslaunch husky_gazebo husky_playpen.launch
It will look similar to:
second terminal open up Rviz with the Clear-path configuration:
$ roslaunch husky_viz view_robot.launch
third terminal start off gmapping.
$ roslaunch husky_navigation gmapping_demo.launch
2D Nav Goal tool in the top toolbar to select a movement goal in RViz.
To save the generated map, you can run the map_saver utility:
$ rosrun map_server map_saver -f <filename>
2D Nav Goal without while we still don’t have a map. Previously, we used the keyboard to move around manually to generate this; however, that’s is not necessary. In fact, let’s use the frontier_exploration package to generate a map.
Close all the terminals first then restart the first two. Now in the third terminal run the following command:
$ roslaunch husky_navigation exploration_demo.launch
Point tool in the top toolbar to draw a closed polygon on the map that the Husky should explore. Watch the terminal window for instructions.As the robot moves, you should see the grey static map (map topic) grow. When the exploration goal is complete, you will see a feedback message in the terminal window. You can now issue a new exploration goal if you wish.

Hello (Real) World with ROS - Robot Operating System by TU Delft OpenCourseWare is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Based on a work at https://online-learning.tudelft.nl/courses/hello-real-world-with-ros-robot-operating-systems//.