



3.2.1 Anatomy and human movement
Course subject(s)
Module 3. Creating Movement: Making the Exoskeleton Walk
We will kick off this module with an introduction to human anatomy and the human gait – the manner of walking. If you understand the human gait, you can better understand the gaits made for exoskeletons. Moreover, we will introduce you to some terminology that will be used throughout the module.
Types of movement in the lower body
With the ‘lower body’ we usually mean the part of the body from hip to toes, which includes the hip joint, the knee joint, and several joints in the ankle and foot. Each of these joints can move in a number of directions and each with a different range of motion. The range of motion is the extent of the movement in a certain joint, measured in degrees. We distinguish the passive and active range of motion. We call it a passive range of motion when the joint is relaxed and an outside force, such as another person, moves the body part. Conversely, active range of motion is the extent of the movement when the individual itself moves the joint through muscle contractions, so no external force is applied. Interestingly, these two ranges of motion can differ. For example, if you bend your knee with muscle force only, you can only bend it to a certain limit. But if you grab your lower leg and pull some more – so you pull the joint through the passive range of motion – you can move it further. This brings us to a third type, active-assisted range of motion, which is a combination of the two. Note that when determining the range of motion for the joints in the exoskeleton, of course, the passive range of motion of the pilot is used. An important thing to note is that in people with spinal cord injury, the range of motion may be impaired due to contractures (permanent shortening of a muscle), especially when the person has been wheelchair-bound for a long period of time.
Hip joint
The hip joint is a so-called ball-and-socket joint. In the image below you can clearly see the origin of this name. The structure of the joint makes movement in all directions possible.
Figure 1: Image of the hip joint. Source: Hueftgelenk-gesund by Scuba-limp~commonswiki licensed under CC BY-SA 3.0
{kind=link}
Six directions of movement are distinguished (see figure 2):
- Moving the leg forward and backward is called respectively the flexion and extension movement. The average person has a range of motion in the hip of 140° flexion and 20° extension.
- Moving the leg sideways away from the midline of the body is called abduction. Moving it again towards the midline of the body is called adduction. The average person has a range of motion of 50° abduction and 30° adduction with a straight leg.
- Rotation of the leg inwards is called endorotation, and outwards is called exorotation. With a straight hip joint, the range of motion for endorotation is 30° and exorotation 40°.
Figure 2: Directions of movement in the hip joint
Knee joint
The knee is a hinge joint, as shown in the image below.
Figure 3: Image of the knee joint. Source: X-ray of a normal knee by lateral projection by Mikael Häggström licensed under CC0 1.0
{kind=link}
The main movement is in one direction: flexion and extension. Flexion is possible until 120-150°, while extension is only a very small motion: 5-10°. However, with the knee bent 90°, endorotation and exorotation (rotation inwards and outwards) are also possible! (You wouldn’t expect that with a hinge in everyday life!) The range of motion for endorotation is about 10°, while the range of motion for exorotation is 30-40°.
Figure 4: Directions of movement in the knee joint
Ankle and foot
The ankle and foot contain several smaller joints, making the movements complex and – in most cases – mostly coupled to each other.
Figure 5: Image of a foot with all joints. Adapted from: X-ray of normal right foot by lateral projection by Mikael Häggström licensed under CC0 1.0
{kind=link}
We will only mention the movement in the joint between the bones of the foot and the bones of the lower leg: plantarflexion and dorsiflexion motion. Plantarflexion is when the foot points downwards with respect to the body and has an average range of motion of 40-50°, and dorsiflexion is when the foot points upwards with respect to the body, which has a range of motion of 20-30°. Where the plantarflexion/dorsiflexion motion takes place is marked with a blue line in Figure 5.
Figure 6: Plantarflexion and dorsiflexion in the ankle joint.
Terminology of the gait cycle
When we speak of a gait cycle, we usually mean the sequence of events between the moment that one foot touches the ground until that same foot touches the ground again. This cycle is repeated continuously. The moment the foot makes contact with the ground is called initial contact or heelstrike. We will look at the gait cycle now from the perspective of the right leg, but of course, the left leg follows exactly the same sequence.
During one gait cycle, one stride is covered. This is the distance between two successive instances of the same foot contacting the ground. Half a stride length, from foot contact with one foot until foot contact with the other foot, is called the step length. The stride width is the horizontal distance between the two feet. The duration of one gait cycle is called the cycle time. The walking speed is the number of meters covered per second and can therefore be calculated by dividing the stride length in meters by the cycle time in seconds. Lastly, the cadence is the number of steps taken in a given time. The difference between stride length and step length is illustrated in the next figure.
Figure 7: Gait parameters. Source: Illustration of Gait Parameters including step width, step length, and stride length. by Muyinat Y. Osoba et al. (2019) licensed under CC BY-NC-ND 4.0
One gait cycle is divided into a stance phase and a swing phase. During the stance phase of one leg, the foot is in contact with the ground. During the swing phase, the foot is not in contact with the ground. Furthermore, we distinguish between double support and single support. With double support, both feet are in contact with the ground. With single support, only one foot is in contact with the ground. These phases are outlined in the figure below.
Figure 8: Stance phase and swing phase. Source: An illustration of gait phases by Mariem Abid et al. (2019) licensed under CC BY 4.0
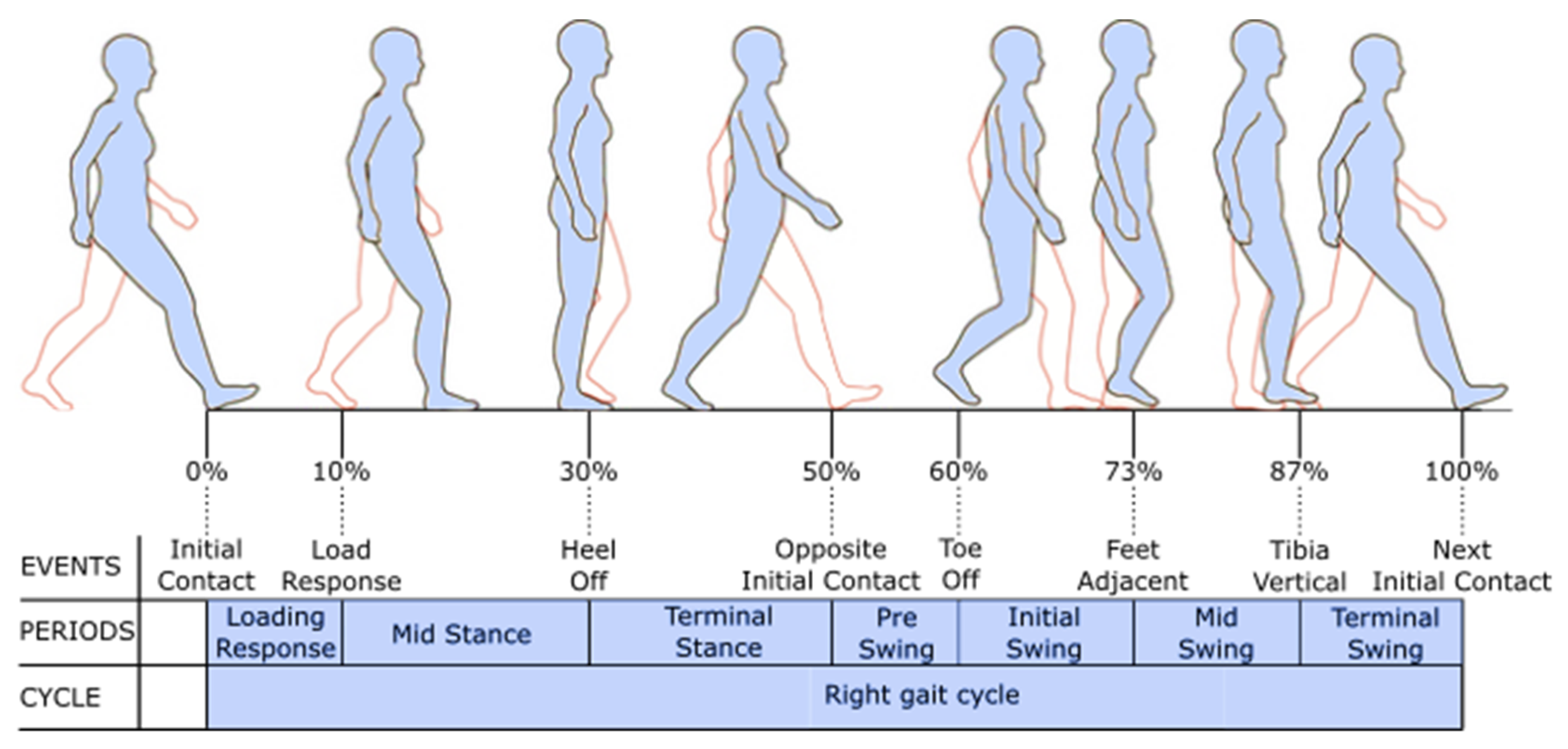
Finally, specific terminology is used to describe major events during one gait cycle. These events (the top row in figure 9) divide the gait cycle into seven periods (the middle row in figure 9). As already mentioned, the gait cycle starts with initial contact. Halfway through the gait cycle, opposite initial contact happens, when the opposite foot touches the ground – one step is now taken. Shortly after, the right foot leaves the ground (toe off). This is the start of the swing phase for the right leg, until the next initial contact. Then, the gait cycle starts again. Take a look at figure 9 and see if you can understand all the events and periods in the gait cycle – as images speak louder than words. Maybe you can try to identify these events in your own gait cycle!
Figure 9: The phases of the gait cycle. Source: Gait cycle by Andreas Schicketmueller et al. (2019) licensed under CC BY 4.0
{kind=link}
Gait analysis
Doing a gait analysis is really helpful if you want to gain insight into someone’s walking pattern. There are several ways you can analyze gaits. Simply looking at someone walking or at a video of someone walking is the most straightforward. Just as measuring cadence or cycle time with a stopwatch and stride length while counting strides when walking a known distance. More advanced methods are available as well, such as camera based systems with markers on the body. Reflective markers are placed on predetermined locations on the body and then recorded with a specialized camera. From the position and orientation of the markers relative to each other, the joint angles can be measured. This is an effective way of analyzing someone’s walking pattern.
The next step is to see what the gaits in an exoskeleton look like and how they are made.

Project MARCH: behind the technology of robotic exoskeletons by TU Delft OpenCourseWare is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.
Based on a work at https://online-learning.tudelft.nl/courses/project-march-behind-the-technology-of-robotic-exoskeletons/